目录链接放在下方,学习过程中会逐步更新现代机器人:力学,规划,控制读书笔记(chapter1)-Mr.Bo的文章-知乎...

目录链接放在下方,学习过程中会逐步更新
现代机器人:力学,规划,控制读书笔记(chapter1) - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369236960
上一帖链接:
现代机器人:力学,规划,控制(chapter3 Ⅰ) - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369361857
接上一帖,我们已经介绍完了旋转矩阵和角速度的相关知识,接下来我们来看旋转的另一种表示方法,指数坐标(Exponential Coordinate )。
那么指数坐标(Exponential Coordinate )的作用是什么呢,这里依旧用原书给出的定义:
The exponential coordinates parametrize a rotation matrix in terms of a rotation axis (represented by a unit vector ) and an angle of rotation θ about that axis; the vector
then serves as the three-parameter exponential coordinate representation of the rotation.
用指数坐标 来描述旋转矩阵R可以这样解释:
(1)如果定系s绕 轴旋转θ,新的位置相对于定系将由旋转矩阵R表达
另外两个描述一时想不出如何好的翻译,就先贴在这里,有知道的大佬欢迎来评论区讨论啊
(2)the angular velocity expressed in {s} such that, if a frame initially coincident with {s} followed
for one unit of time (i.e.,
is integrated over this time interval), its final orientation would be expressed by R.
(3)the angular velocity expressed in {s} such that, if a frame initially coincident with {s} followed
for θ units of time (i.e., θ is integrated over this time interval) its final orientation would be expressed by R.
之后继续来讨论一下需要的基础知识,线性微分方程的一些内容:
有这样的一个方程,初始条件为 :
根据高等数学的知识,我们知道这个方程的解为:
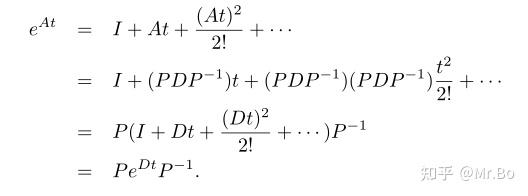
这时候,如来神展就要发功了,利用 的麦克劳林级数,有:
进阶,现在换成向量微分方程,初始条件不变:
这个方程的解为:
根据矩阵分析中的知识
可以证明,如果A是常数且有限,那么这个级数总是保证收敛,具体请看矩阵分析相关的书。
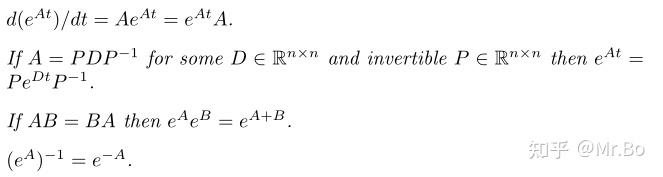
继续,对于 的任意方阵A和B,下式总是成立:
如果:
那么:
如果D是一个对角阵,那么结果将非常好计算。
推导了这么半天,总结一下:
向量微分方程 ,在初始条件为
时,解为
,式中:
矩阵指数 有如下性质:
这样,热身工作结束,接下来进入旋转指数坐标
旋转指数坐标可以看成:
(1)绕某轴 (
)旋转
(2)将(1)中两者相乘形成的三维向量
如下图所示,向量p(0)绕轴经过时间t旋转θ为
根据我们之前的结论,这样p(t)矢量末端的线速度 可以表示为:
这个式子和我们之前介绍的向量微分方程如出一辙,因此它的解为:
那意味着p(0)绕轴旋转后的新位置为:
接着我们进一步展开这个式子,由于 是斜对称阵,运算一下就有
这样:

继续化简,可以看出括号内正好和sin和cos的麦克劳林级数有联系:
这样就有了下面这个描述:
对于一个向量 ,
是任意标量,
是单位向量,
, 绕轴
旋转
的旋转矩阵就可以写成:

上式就是著名的Rodrigues’formula。
通过这种方式,我们就可以很方便的完成旋转操作。比如我们要对3x3的矩阵B进行旋转,那么 表示在定系中绕
轴旋转θ,
表示在动系中绕
轴旋转θ。
纯理论是不是过于抽象,这里我们举个例子:
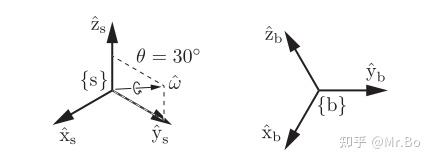
图中定系s绕 旋转30°,那么旋转矩阵就可以表示为:
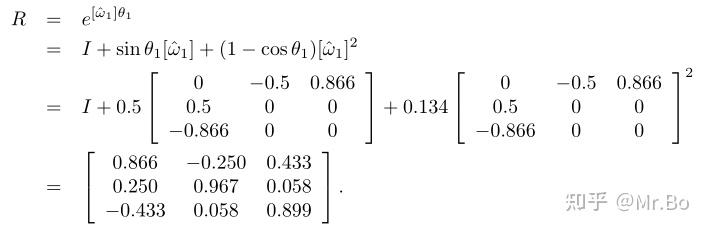
假设定系s的矩阵是单位阵I,那么转动后的新位置就是R,注意角度不同,旋转后的位置不一致。
接下来进一步进行讨论:
如果 表示旋转矩阵R的指数坐标,那么斜对称阵
就是旋转矩阵R的矩阵对数(matrix logarithm)。通过这种方式,就在旋转矩阵和向量之间搭建了桥梁:
旋转矩阵表示为:
为了推导矩阵对数,我们先将Rodrigues’formula展开:

式中, ,
,由于旋转矩阵是对称阵,对矩阵减去它的转置后我们可以得到:
上式中 ,就有:
上面解出的式子可以表示为斜对称阵:

由于 的存在,这里得做出讨论:
当 时,引入矩阵的迹:
因为 是单位向量,因此
,那么对于任意
满足
且
,旋转矩阵R就可以用指数坐标
来描述,其中:
当 时,
,
当k为偶数时,这意味着已经绕轴转回了 ,所以转轴
没有被定义。
当k为奇数时,旋转矩阵可以表示为:
继续运算就有:
由于旋转矩阵是对称阵,因此所有元素都计算完毕了。
到这里,矩阵对数的推导就结束了,总结一下:
对于给出的旋转矩阵 ,绕单位旋转轴
旋转一个角度
,向量
表示旋转矩阵R的指数坐标,斜对称阵
表示旋转矩阵R的矩阵对数(matrix logarithm )。
就有以下情况:
(1)如果 ,意味着
且旋转轴
没有被定义
(2)如果 ,意味着
,旋转轴
的表示为下式三者任意一个:
(3)如果 ,那么:
满足上述三个条件中的一个,对于一个旋转矩阵R的指数坐标就存在一个矩阵对数。
接下来介绍刚体运动或齐次变换矩阵:
先来说明一些符号,刚体运动的矩阵用T来表示,转轴表示为S,指数坐标就为 ,这样速度向量
,动系b相对于定系s的转动用旋转矩阵
来描述,动系b的原点相对于定系的位置用向量
来描述,这样:
一个 special Euclidean group ,被称为刚体运动或齐次变换矩阵,就写作下式:
它也可以写成这个形式 ,这个在前面的文章中我们介绍过了,可以返回去看一下。
上面的式子是描述三维空间刚体运动的矩阵,那么刚体在二维平面的运动如何表示呢,其实定义方式一样:
一个 special Euclidean group ,
,
,那么二维平面内刚体运动的矩阵就为:
常用的形式就是:
有了上面的矩阵,我们就可以描述刚体的运动,接下来对刚体运动矩阵的性质进行探究:
变换矩阵的逆矩阵为:
两个变换矩阵的乘积还是一个变换矩阵,但是矩阵乘法不满足交换律,因此:
但是这里出现了一个问题,变换矩阵是4x4的,但是在坐标系里表达的向量x是1x3的,可以通过添1的方法把向量x扩展成4维的,和变换矩阵相乘就可以对向量x进行几何操作,如下式:
如果我们用向量坐标来描述刚体上的点,那么通过上式就能很好的描述刚体的运动。
对于变换矩阵T,它有着和旋转矩阵一致的性质,这里就不再赘述,矩阵内部值不同,代表的含义也不同,比如只旋转不平移的矩阵:
只平移不旋转的矩阵:
变换矩阵可以完成很多操作,个人感觉本书这里讲的不是很好,大家可以去看看图形变换的矩阵方法,相信会对变换矩阵有一个深入的了解。
写到这里,我么所需要的所有预备知识就介绍完毕了,接下来我们将讨论刚体运动的线速度,角速度组成的twist,力和力矩组成的wrench,这就需要开新帖了(应该是chapter3的最后一帖),链接如下:
现代机器人:力学,规划,控制(chapter3 Ⅲ) - Mr.Bo的文章 - 知乎 https://zhuanlan.zhihu.com/p/369718204















如果认为本文对您有所帮助请赞助本站